Search
Now showing items 1-2 of 2
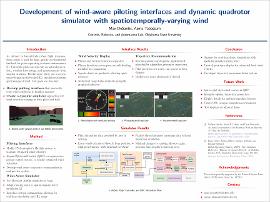
Development of wind-aware piloting interfaces and dynamic quadrotor simulator with spatiotemporally varying wind
(2022-03-30)
With increasing adoption of low-altitude Unmanned Aerial Vehicles (UAVs) in urban environments, alongside present-day research into low-altitude Urban Air Mobility (UAM) vehicles, there exists a need for high quality ...

IGVC Team: Joyride self-driving car
(4/28/2023)
The overarching objective of the Intelligent Ground Vehicle Competition (IGVC) capstone project is to develop a self driving vehicle capable of competing in the annual IGVC Self-Drive challenge. In order to do so, the team ...