| dc.contributor.advisor | Cutkosky, Mark | |
| dc.contributor.author | Ray, Shawn | |
| dc.contributor.author | Chen, Tony | |
| dc.contributor.author | Hoffmann, Kenneth | |
| dc.contributor.other | Stanford University. Biomimetics and Dexterous Manipulation Lab | |
| dc.date.accessioned | 2021-09-24T16:28:17Z | |
| dc.date.available | 2021-09-24T16:28:17Z | |
| dc.date.issued | 2021-10-09 | |
| dc.identifier | oksd_OK-LSAMP_2021_ray | |
| dc.identifier.citation | Ray, S., Chen, T., Hoffmann, K., & Cutkosky, M. (2021, October 9). Dynamic simulation and modeling of gripper for applications in autonomous drone catcher. Poster session presented at the Oklahoma Louis Stokes Alliance for Minority Participation's 27th Annual Research Symposium, Stillwater, OK. | |
| dc.identifier.uri | https://hdl.handle.net/11244/330966 | |
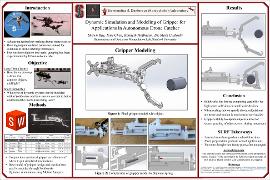
| dc.description.abstract | With advancing technology allowing for drones to become more efficient and evasive in their flight paths, researchers are looking for ways to solve the question of how can these drone be caught midair? Drawing inspiration from nature, the Biomimetics and Dexterous Manipulation Laboratory has developed a method of catching drone’s midair with an in-house designed and manufactured drone utilizing mechanisms from natures design. In implementing this drone design, simulations were needed to gain a better understanding of how the drone catcher would work as well as what data could be collected from a simulated collision. The 3D modeling software Solidworks was utilized to run a realistic simulation on the movement and motion of the main drone catching gripper. In running the simulations on the gripper collisions, it was found that this software was not capable of running high speed collisions at such a high rate of speed. In order for accurate simulations to be run, numerous calculations were needed to be evaluated in the span of a few thousandths of a second. This processing power could not be run on relatively powerful computers and the simulation was run at a slower, micro-gravity emulating, rate of speed. The resulting simulation gave a better understanding of how the drone catching device could capture objects midair, as well as how the mechanism worked within an instance of a collision. | |
| dc.description.sponsorship | Oklahoma Louis Stokes Alliance for Minority Participation Program | |
| dc.description.sponsorship | Stanford University. Summer Undergraduate Research Fellowship | |
| dc.description.sponsorship | Skydio | |
| dc.format | application/pdf | |
| dc.language | en_US | |
| dc.publisher | Oklahoma State University | |
| dc.rights | In the Oklahoma State University Library's institutional repository this paper is made available through the open access principles and the terms of agreement/consent between the author(s) and the publisher. The permission policy on the use, reproduction or distribution of the article falls under fair use for educational, scholarship, and research purposes. Contact Digital Resources and Discovery Services at lib-dls@okstate.edu or 405-744-9161 for further information. | |
| dc.title | Dynamic simulation and modeling of gripper for applications in autonomous drone catcher | |
| osu.filename | oksd_OK-LSAMP_2021_ray.pdf | |
| dc.description.department | Mechanical Engineering | |
| dc.type.genre | Poster | |
| dc.type.material | Text | |
| dc.subject.keywords | drones | |
| dc.subject.keywords | 3d modeling | |
| dc.subject.keywords | dynamic simulations | |
| dc.subject.keywords | solidworks | |