Apparatus for branched scissor linkage and associated auxetic mechanisms
| dc.date.accessioned | 2023-11-07T17:38:41Z | |
| dc.date.available | 2023-11-07T17:38:41Z | |
| dc.date.issued | 2023-07-18 | |
| dc.identifier | pat11702327 | |
| dc.identifier.uri | https://hdl.handle.net/11244/339966 | |
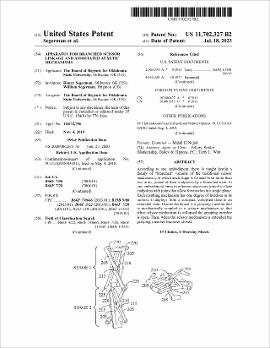
| dc.description.abstract | According to one embodiment, there is taught herein a family of "branched" variants of the traditional scissor mechanism, in which each stage is formed from more than two arms, joined at their midpoints by a branched rivet. In one embodiment arms in adjacent stages are joined at their endpoints with joints that allow for rotation in a single plane. Each resulting mechanism has one degree of freedom in its motion. It deploys from a compact, collapsed state to an extended state. One embodiment is a grasping member that is mechanically coupled to a scissor mechanism so that when scissor mechanism is collapsed the grasping member is open. Then, when the scissor mechanism is extended the grasping member becomes closed. | |
| dc.format | application/pdf | |
| dc.format.extent | 14 pages | |
| dc.language | en_US | |
| dc.publisher | U.S. Patent and Trademark Office | |
| dc.title | Apparatus for branched scissor linkage and associated auxetic mechanisms | |
| dc.type | Text | |
| osu.filename | pat11702327.pdf | |
| osu.accesstype | Open Access | |
| dc.type.genre | Patent | |
| dc.contributor.inventor | Segerman, Henry | |
| dc.contributor.inventor | Segerman, William | |
| dc.identifier.patentID | 11702327 | |
| dc.date.filed | 2019-22-04 | |
| dc.contributor.assignee | The Board of Regents for Oklahoma State University | |
| dc.subject.cpcclasses | B66F 7/0666 (2013.01) | |
| dc.subject.cpcclasses | B25B 9/00 (2013.01) | |
| dc.subject.cpcclasses | B66F 3/22 (2013.01) | |
| dc.subject.cpcclasses | B66F 7/28 (2013.01) | |
| dc.subject.cpcclasses | B25J 1/06 (2013.01) | |
| dc.subject.cpcclasses | B66F 11/042 (2013.01) |
Files in this item
This item appears in the following Collection(s)
-
Patents [208]