AMSERP - Adaptable Multi-Sensor Emplacement and Recovery Payload
Abstract
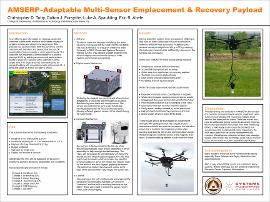
Through testing and evaluation of AMSERP, the concept of a portable, unmanned aerial vehicle, capable of semiautonomously placing and recovering multiple small sensors has been proven viable. There are issues that must be addressed during further development; however, the mission parameters have been met. With continuing efforts, a field-ready system could be produced that would reduce the workload and, more importantly, the risks associated with the covert emplacement and recovery of intelligence collection sensors near strategic targets. Additionally, this technology could reduce mission costs and increase end user capabilities significantly.