| dc.date.accessioned | 2021-03-08T19:31:57Z | |
| dc.date.available | 2021-03-08T19:31:57Z | |
| dc.date.issued | 2020-09-08 | |
| dc.identifier.uri | https://hdl.handle.net/11244/329013 | |
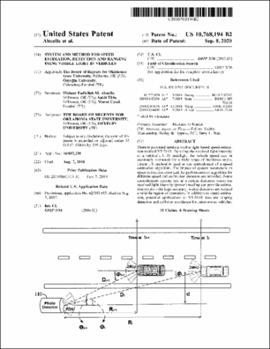
| dc.description.abstract | There is provided herein a visible light-based speed estimation method ViLDAR. By using the received light intensity of a vehicle's LED headlight, the vehicle speed can be accurately estimated for a wide range of incidence angle. Linear LS method is used in one embodiment of a speed estimation algorithm. The impact of system parameters on speed estimation error and the performance of algorithm for different speed and estimation duration are provided. Some embodiments operate best at a certain distances where the received light intensity (power) reading can provide estimation results with high accuracy, which distances are termed a reliable region of operation. In addition to speed estimation, potential applications of ViLDAR idea are ranging detection and collision avoidance for autonomous vehicles. | |
| dc.format | application/pdf | |
| dc.format.extent | 16 pages | |
| dc.language | en_US | |
| dc.publisher | U.S. Patent and Trademark Office | |
| dc.title | System and method for speed estimation, detection and ranging using visible light in vehicles | |
| dc.type | Text | |
| osu.filename | pat10768194.pdf | |
| osu.accesstype | Open Access | |
| dc.type.genre | Patent | |
| dc.contributor.inventor | Abuella, Hisham Fadlallah M. | |
| dc.contributor.inventor | Ekin, Sabit | |
| dc.contributor.inventor | Uysal, Murat | |
| dc.identifier.patentID | 10768194 | |
| dc.date.filed | 2017-08-07 | |
| dc.contributor.assignee | Board of Regents/Oklahoma State University and the A & M Colleges | |
| dc.contributor.assignee | Ozyegin University | |
| dc.subject.cpcclasses | G01P 3/36 (20130101) | |