System and Method for Inducing Motion in a Rolling Robot Using a Dual Telescoping Linear Actuator
Abstract
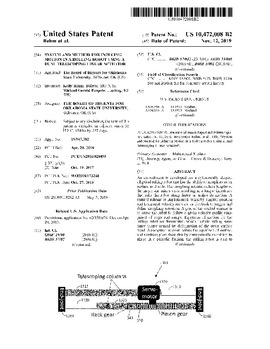
An embodiment is developed for a cylindrically shaped, elliptical rolling robot that has the ability to morph its outer surface as it rolls. The morphing actuation alters lengths of the major and minor axes, resulting in a torque imbalance that rolls the robot along faster or brakes its motion. A control scheme is implemented, whereby angular position and horizontal velocity are used as feedback to trigger and define morphing actuation. A goal of the control scheme is to cause the robot to follow a given velocity profile comprised of steps and ramps. Equations of motion for the rolling robot are formulated, which include rolling resistance torque caused by deformation of the outer surface tread. A computer program solves the equations of motion, and resulting plots show that by automatically morphing its shape in a periodic fashion, the rolling robot is able to commence from an initial position, achieve constant average velocity and slow itself.
Collections
- Patents [208]